Designing a simple and yet functional Line Follower Robot (LFR) is always a fascinating and challenging subject to be learned, the LFR actually could be implemented in many ways start from a simple two transistors to a sophisticated PID (Proportional, Integrate and Differential) which take advantage of the programmable feature of microcontroller to calculate the PID equation to successfully navigate the black track line on a white background surface.

The Line Follower Robot


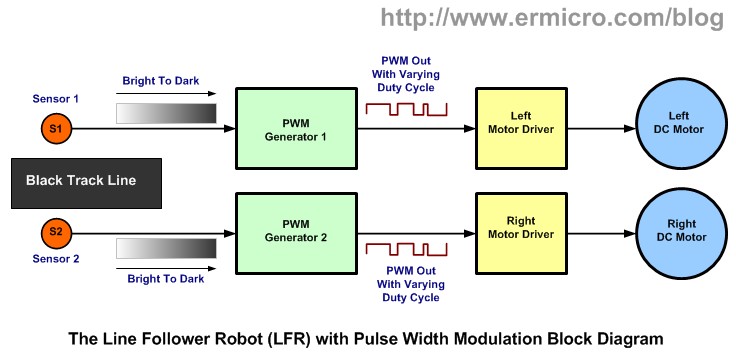
The easy method to navigate the black track line is to turn
ON and OFF the left or the right DC motor according to the sensor reading
(black turn OFF and white turn ON), but using this method will make the LFR to
move in zigzag way. By proportionally control both left and right DC motor
speed according to the light intensity level received by the photocell sensor
(reflected back by the black track line) we could make the LFR easily navigate
this track. The common technique to control the motor speed efficiently is to
use a pulse signal known as the pulse width modulation or PWM for short.
Actually generating the PWM signal is easier with microcontroller instead of discrete components because all you have to do is to program the microcontroller PWM peripheral to do the task. On this tutorial we will learn of how to build this LFR with Voltage Control PWM using the same working principal found in many today’s modern microcontroller but using just the analog electronic components.
Now let list down the necessary electronic and other supported components to build this awesome LFR:
1. Resistors: 220 (2), 1K (2), 15K (1), 33K (1), 47K (2), and 100K (1)
2. Trimpots: 100K (2)
3. Two Light Dependent Resistor (dark above 100KOhm and below 5KOhm on bright light intensity)
4. Capacitors: 47uF/16v (1) and 0.1uF (5)
5. Diodes: 1N4148 (2)
6. High Intensity 3 mm blue Light Emitting Diode (2)
7. Optional 5 mm auto flash RGB LED with 330 Ohm resistor for the power indicator
8. Transistors: BC639 (2)
9. IC: National Semiconductor LM324 Quad Operational Amplifier (1)
10. DC Motor: Solarbotics GM2 Geared DC motor with Wheel (2)
11. Prototype Board: 52 x 38 mm for main board and 50 x 15 mm for sensors
12. 3xAA Battery holder
13. CD/DVD ROM (2)
14. Plastic Beads and Paper Clip for the castor (the third wheel)
15. Bolt, Nuts, Double Tape and Standard Electrical Tape for the black line



The voltage control PWM could be generated by first using
the triangle signal generator which provide the basic PWM pulse frequency and
the necessary ramp voltage (rise and down) to produce the PWM signal. Next by
continuously comparing this ramp voltage according to the voltage level
produced by the photocell sensor using the comparator circuit we could produced
the exact voltage control PWM as shown on this following picture.

The voltage control PWM could be generated by first using
the triangle signal generator which provide the basic PWM pulse frequency and
the necessary ramp voltage (rise and down) to produce the PWM signal. Next by
continuously comparing this ramp voltage according to the voltage level
produced by the photocell sensor using the comparator circuit we could produced
the exact voltage control PWM as shown on this following picture.

The ramp signal is provided by the two op-amps (U1A and U1B)
that generate the triangle wave signal while the comparator for producing the
PWM to each DC motor is provided by the other two op-amps (U1C and U1D) that
receipt its input from the voltage divider circuit (VR and LDR) which provide the
voltage threshold point and together with the triangle wave to produce the
required PWM pulse

The PWM principal explained above is also used in many
today’s modern microcontrollers PWM peripheral; but instead of processing the
analog signal it process the digital signal. The ramp signal is replaced by the
digital counter (TIMER peripheral) that will count up from 0 to 255 and start
from 0 again, while the threshold point voltage is provided by threshold point
register that hold the digital value (e.g. 100).
Microcontroller uses the digital comparator to compare these two digital
values, when the digital counter counting up and reach the threshold point
(i.e. 100) then the PWM peripheral will turn on to the output port and when it
reach the maximum value (i.e. 255) it will turn off to the output port.
Therefore by changing the threshold point register value we could change the
PWM duty cycle output. You could read more about microcontroller based PWM on H-Bridge
Microchip PIC Microcontroller PWM Motor Controller and Introduction
to AVR Microcontroller Pulse Width Modulation (PWM) articles on this blog.
The Triangle Wave Generator Circuit

When the power up we assume the U1A output is HIGH (Vcc); the C2 capacitor will start to charge through the R5 resistor. Because the R5 and C2 is connected to the U1B inverting input (V-), therefore the U1B output will start to ramp down. The U1A non inverting input (V+) get the positive feedback from R3 and R4, when the U1B output voltage reach the threshold voltage below Vref than it will turn the U1A output to LOW (0). This bottom threshold voltage could be calculated as follow:
Vth = (R4 (Vout-u1a – Vout-u1b) / (R4 + R3)) + Vou-u1b; Vout-u1a = Vcc; Vcc = 4.5 Volt
Vth <= Vref, Vref = 0.4 Vcc
(R4 (Vcc – Vout-u1b) / (R4 + R3)) + Vout-u1b <= 0.4 Vcc
Now putting all the resistors value then we will get this following result:
(47 (Vcc – Vout-u1b)/ 147) + Vout-u1b <= 0.4 Vcc
1.4 – 0.3 Vout-u1b + Vout-u1b <= 1.8
Vout-u1b <= 0.6 Volt
Therefore the U1B output will ramp down to about 0.6 volt than the U1A output will turn OFF. Next the C2 capacitor will discharge through R5 and the UA1B output will start to ramp up and it start to increase the voltage across the R4 (Vth – threshold voltage) until the Vth voltage above the Vref voltage then the U1A output will turn to HIGH and the whole cycle will repeat again. This upper threshold voltage could be calculated as follow:
Vth = (R4 (Vout-u1a – Vout-u1b) / (R4 + R3)) + Vou-u1b; Vout-u1a = 0; Vcc = 4.5 Volt
Vth >= Vref; Vref = 0.4 Vcc
(R4 (- Vout-u1b) / (R4 + R3)) + Vout-u1b >= 0.4 Vcc
Now putting all the resistors value then we will get this following result:
(47 (- Vout-u1b)/ 147) + Vout-u1b >= 0.4 Vcc
- 0.3 Vout-u1b + Vout-u1b >= 1.8
Vout-u1b >= 2.6 Volt
Therefore the triangle voltage will ramp up from 0.6 volt to 2.6 volt then ramp down to 0.6 volt repeatedly. The frequency of the triangle wave could be calculated as follow:
Frequency = (1 / (4 x R5 x C2)) x (R3/R4) Hertz
Now putting all the resistors and capacitor value then we will get this following result:
Frequency = (1 / (4 x 15,000 x 0.0000001)) x (100,000/47,000) = 354.61 Hz
As you might guess the actual frequency measured on this Line Follower Robot prototype circuit above is about 292 Hz, this is due to the electronic components tolerance value (resistors and capacitors). Therefore if you want to have the exact frequency you could put a 100K trimport in series with R5 resistors. The voltage divider R1 and R2 provide the voltage reference (DC bias voltage) to both U1A and U1B op-amps.
The Sensor Circuit


As the robot move on the black track line the LDR will
continuously capture the reflected light and convert this light intensity into
the corresponding voltage and feeding it to the inverting input (V-)
of U1C (left sensor) and U1D (right sensor).

The Line Follower Robot Construction


I glue the two CDROM together in order to make more room and
attached the two DC motors, 3xAA battery holder, main board and sensor board
using the double tape. The sensor sensitivities and the Line Follower Robot
speed could be controlled by adjusting the 100K trimport. After putting all the
parts together now is time to watch how this nice Line Follower Robot in
action:
As you’ve seen from the demo video above this Line Follower Robot design is capable to handle and smoothly navigate a quite complex black track line. This prove that a good analog Line Follower Robot design sometimes could outperform many microcontrollers based Line Follower Robot.
Building the Line Follower Robot (LFR) is one of my favorite projects as I enjoy designing and making this kind of robot, it also gives much joy and fun to my kids as well. I hope this project will give you as much joy as I did; building, watching, and playing with this analog Line Follower Robot.
No comments:
Post a Comment